
トンネル内でローカル5Gを利用した低遅延カメラの実証実験を実施
~建設機械の遠隔・無人操作技術の確立と生産性向上を目指して~
コニカミノルタは、株式会社ミライト・ワン、株式会社安藤・間と協力し、建設中のトンネル内でローカル5Gを利用した低遅延カメラによる実証実験を行いました。
【 実験の背景 】 日本国内では生産年齢人口の減少による労働力不足が社会的課題となっています。
特に建設業界では、労働力の確保が大きな課題であり、厳しい労働環境の改善も求められています。
コニカミノルタは、DXでこれらの課題を解決するため、建設機械の遠隔・無人操作技術の確立や生産性向上を目指して、ミライト・ワン、安藤・間とともにトンネル工事現場におけるローカル5G活用の実証実験を行いました。
これらの技術は、工事現場の作業効率化や安全性向上、労働環境の改善に大きく貢献するものと考えており、今後は今回の実験で得られたデータも分析・活用しながら、建設機械の遠隔操作検証などに向けてさらに開発を推進していきます。
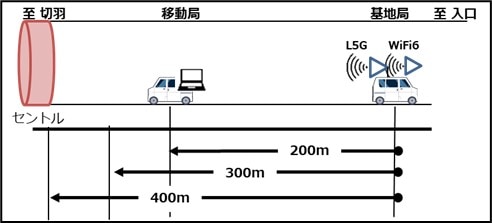
【 低遅延カメラでの実験について 】 画像IoTプラットフォーム「FORXAI(フォーサイ)」を活用して開発したコニカミノルタの低遅延カメラをトンネル内に構築したローカル5G環境に接続し、高精細映像を伝送する実験を行いました。
カメラと映像を受信・表示するディスプレイとの距離を200m、300m、400mと離しながら映像の伝送と遅延時間を検証した結果、全地点でカメラの撮影からディスプレイへの表示にかかる遅延を100ミリ秒(0.1秒)以下に抑え、4Kの高精細映像を伝送できることを確認しました。
この技術を活用すれば、トンネル内などの特殊な環境下でも建設機械の遠隔操作で遅延が許されない緊急停止や違和感のないスムーズな操作が実現します。また、リアルタイムで4K高精細映像を取得できることから、AIの映像解析による危険検知なども可能になります。
詳細はコニカミノルタホームページのNewsroom(ニュースリリースサイト)をご覧ください。
トンネル内でローカル5Gを利用した低遅延カメラの実証実験を実施 ~建設機械の遠隔・無人操作技術の確立と生産性向上を目指して~